杨东援 毕业于同济大学,获学士、硕士、博士学位,曾任同济大学交通运输工程学院院长、校长助理、副校长等职,现任同济大学教授,并担任中国城市交通规划学会副理事长、中国智能交通协会常务理事、上海市交通工程学会副理事长、上海市规划委员会委员等职务。
主要研究领域为交通规划、智能交通系统等。主持了上海市世博会交通规划研究、深圳等12个省市的物流系统规划,合肥等5个城市的公交规划,惠州、湘潭等6个城市的综合交通规划,深圳等城市智能交通系统规划等项目。现承担中国国家自然科学基金重点项目、国家支撑计划项目等研究工作。出版《交通规划决策支持系统》等专著,发表论文100余篇。已培养博士、硕士研究生70余人。
信息环境下的交通规划与管理
1.引言
今年来我国城镇化和机动化进程不断加快,城市交通面临空前的压力。与此同时,对于可持续发展的关注及资源约束的显现,使得传统的硬件设施扩展方法解决交通问题的路径越走越窄。
传统交通规划理论依托5-10年一次的交通大调查获取基础数据,并以此为基础建立相关分析模型推断未来、设计方案,这已经与快速发展造成的态势急剧变化不相适应,也不能及时对于系统偏离期望轨迹演变作出及时的调控。而传统的交通管理理论依托交通流仿真分析,对于路网进入敏感临界状态产生的复杂变化不能进行有效的辨识、预警和预测,难以对于系统进行精细的调控。
伴随相关信息系统的建设,交通参与者在FCD数据、公交IC卡数据、车辆牌照识别数据、移动通信数据等中间留下了大量的电子脚印,从中提取的状态特征和行为特征为交通规划与管理提供了宝贵的信息支持。由于这种信息环境的改变,我们开始有可能对于交通系统进行连续的监测,从而促使相关交通规划与管理理论与技术发生巨大的变革。
2.信息环境下交通规划与管理的体系框架
2.1.核心技术思想
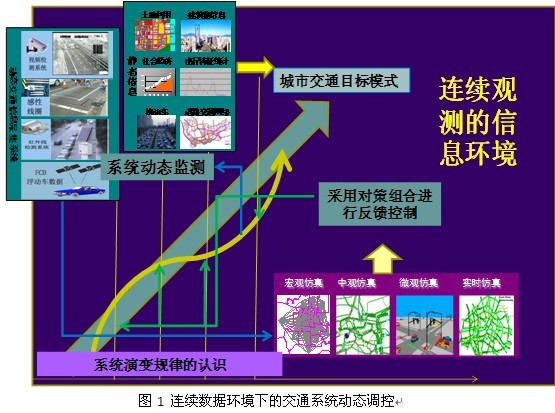
城市交通系统是一个复杂系统,面对这样一个对象我们不可能依据相对静止的观点进行系统优化,而必须对于系统的演变态势进行连续监测,并适时通过政策、工程、管理等多种手段进行组合式干预调控(参见图1),引导并促使系统遵循可持续发展的轨迹演变。
为此,我们需要在传统技术的基础上,进一步建立如下技术能力:
(1)对于城市交通系统演变态势的掌握能力;
(2)采用对策组合进行管理调控的效果预判能力;
(3)根据实测数据对于对策效果进行评估的能力。
通过这种技术能力的建设,将交通规划与交通管理有机融合,从针对某些特定时间节点(5年、10年……)的方案制订,走向针对整个发展过程的控制与管理
共4页 上一页1234下一页